Vamos a hablaros de la reparación de un servodrive compacto Fanuc de seis ejes. En concreto, las imágenes corresponden al modelo A06B-6107-H002. Este equipo tiene la particularidad de realizar el control sobre los seis ejes del robot, y se utiliza en la serie R-30iA Mate Controller de Fanuc. El comportamiento de este dispositivo es como si se tratase de seis drive montados en un solo equipo.
Este tipo de servodrive compacto puede aplicarse en diversos modelos de robots de la serie. Para ser exactos, se puede montar en seis robot de esta serie, que dependiendo de la capacidad de carga y velocidad son:
- ARC Mate 120iC
- ARC Mate 120iB
- M-16iB
- M-20iA
- M-710iC
- R-2000iB
La entrada en taller.
 El primer paso una vez recibimos el dispositivo, es montarlo en uno de los bancos de prueba. El motivo es simular condiciones de trabajo para identificar el error que se está produciendo.
El primer paso una vez recibimos el dispositivo, es montarlo en uno de los bancos de prueba. El motivo es simular condiciones de trabajo para identificar el error que se está produciendo.
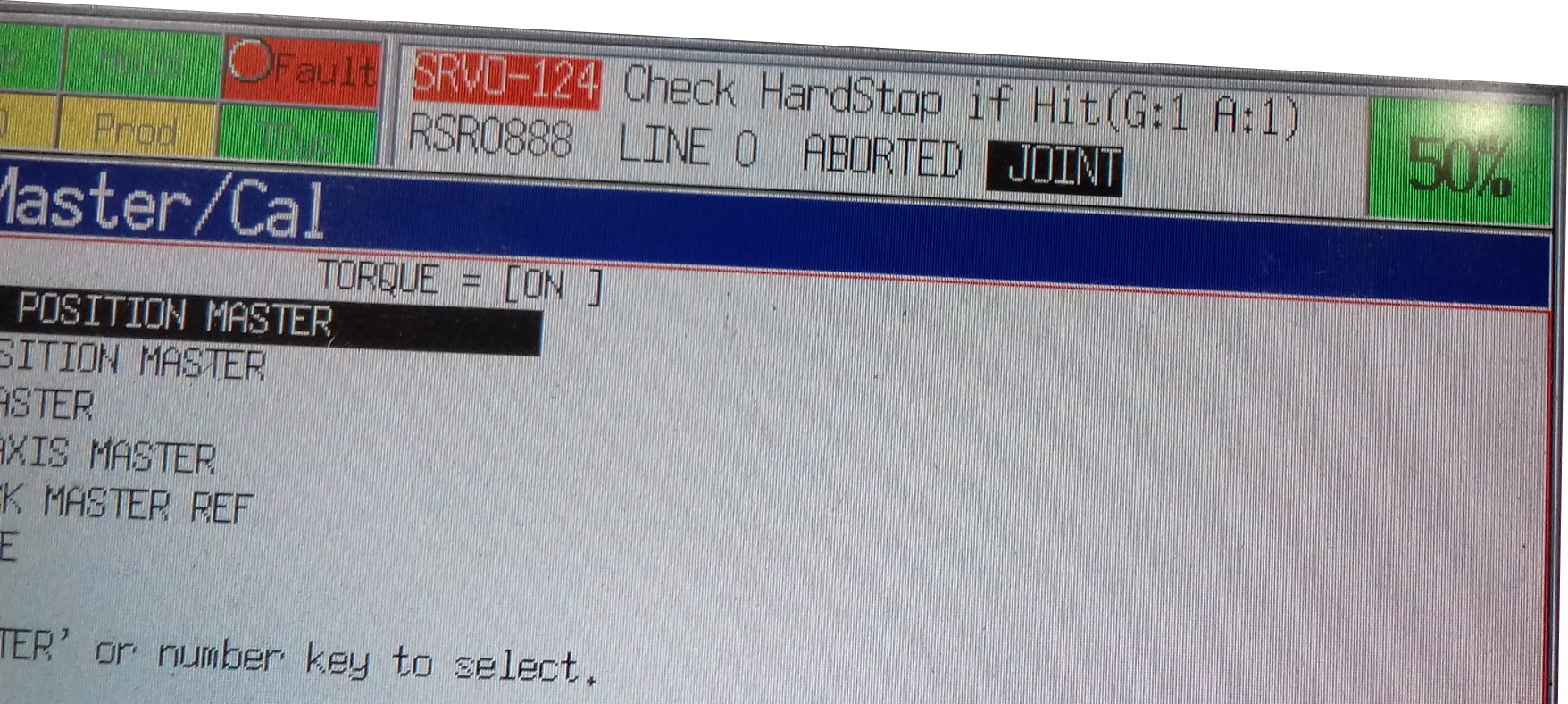
En la imagen de la derecha podemos ver una captura del teach pendant. Este dispositivo es la interface hombre-máquina con el robot, dónde se nos muestra el tipo de error. Al intentar mover en joint aparece el error en los tres primeros ejes y se disparan las alarmas. En el mensaje de la teach pendant se identifica el error en A1, A2 y A3. Es decir en las salidas que controlan los ejes 1, 2 y 3 del robot. Los ejes 4, 5 y 6 estaban funcionando correctamente.
 Para comprobar el error se monta el dispositivo en el banco de prueba y se le somete a trabajo. De esta forma podremos corroborar estos errores de funcionamiento en los controles de los ejes.
Para comprobar el error se monta el dispositivo en el banco de prueba y se le somete a trabajo. De esta forma podremos corroborar estos errores de funcionamiento en los controles de los ejes.
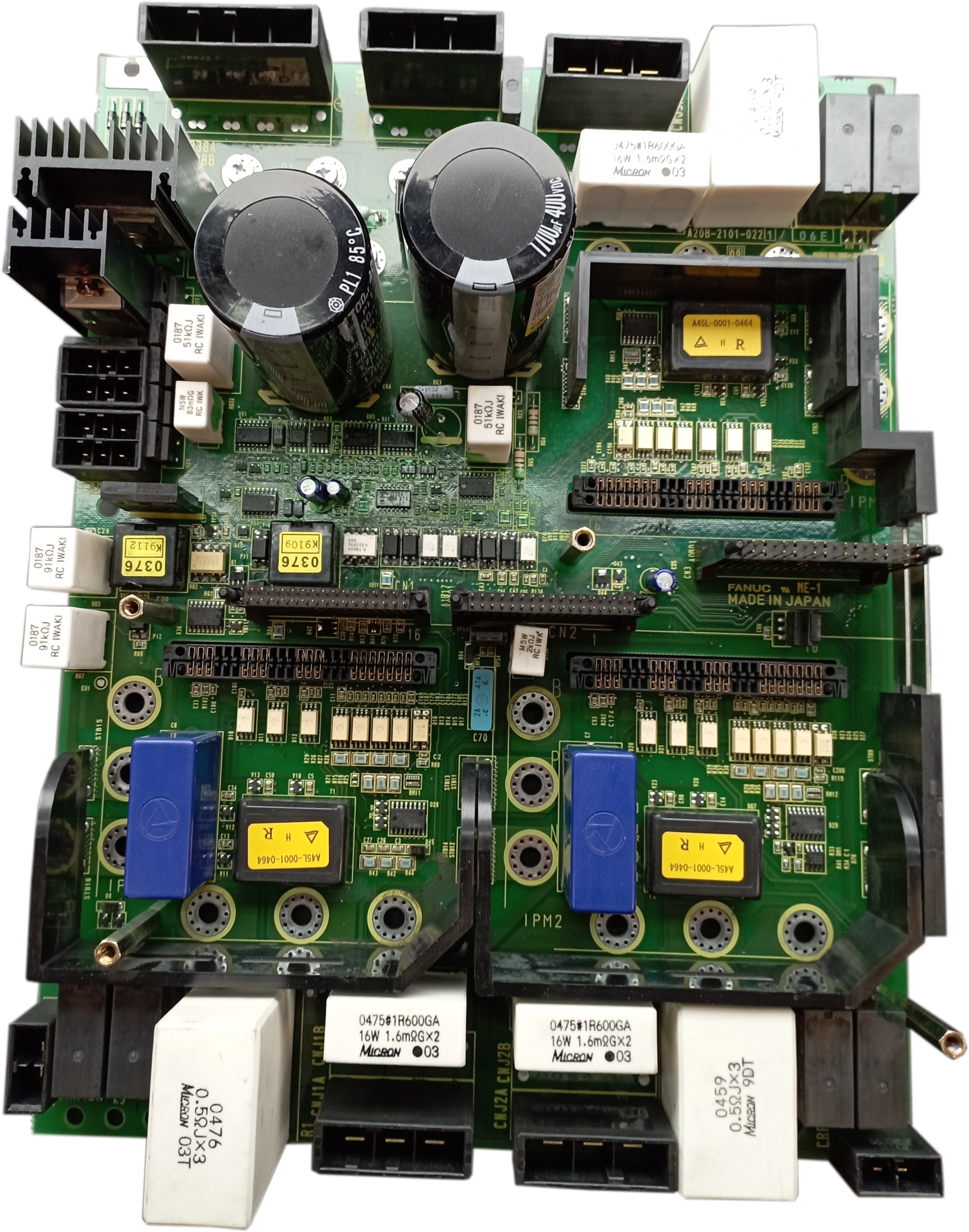
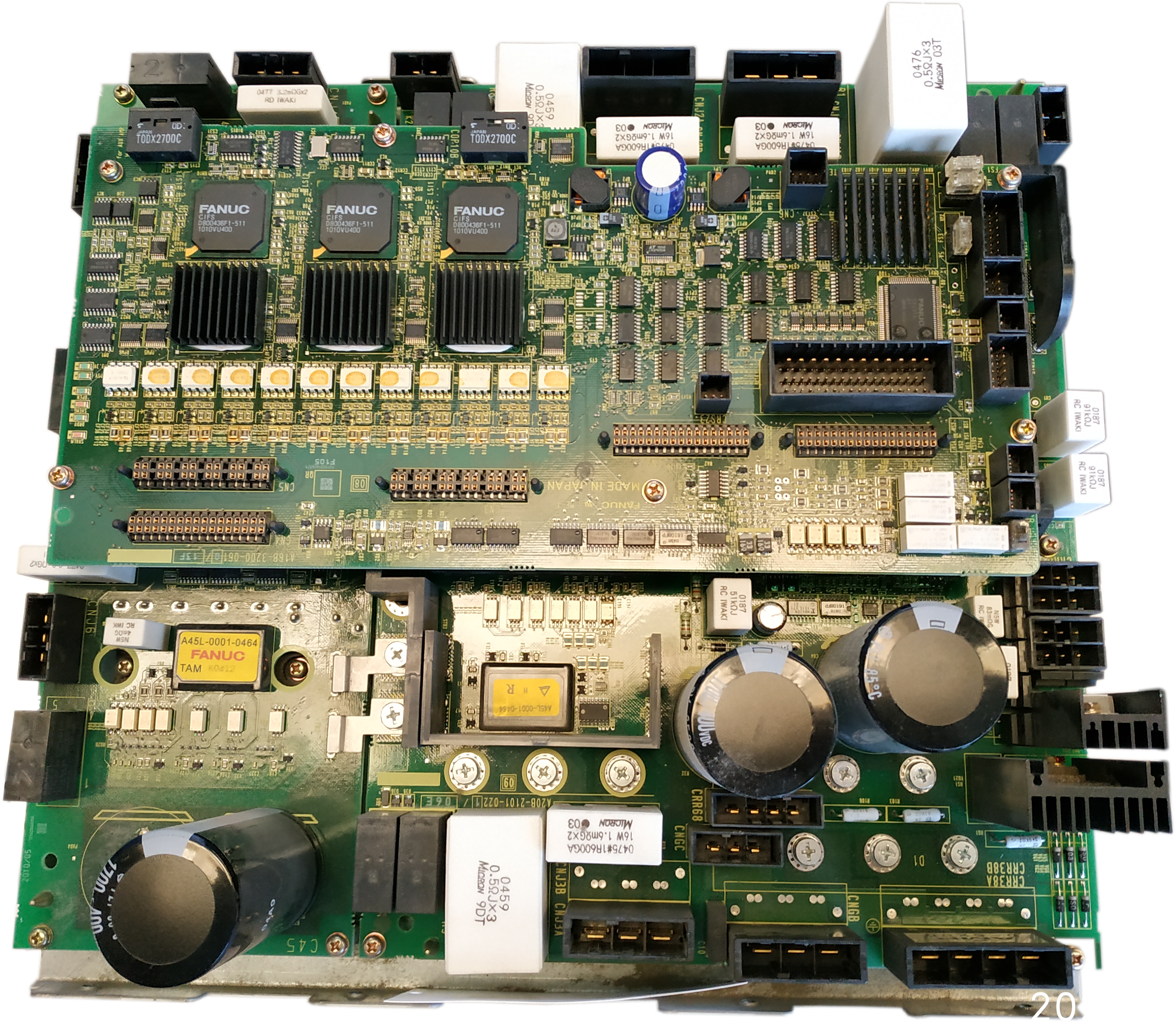
En la imagen de la izquierda se puede observar el conjunto de placas montadas sobre el banco. En concreto, en primer plano vemos la placa de control y bajo ella la placa de potencia, que es la que tiene los dos condensadores.
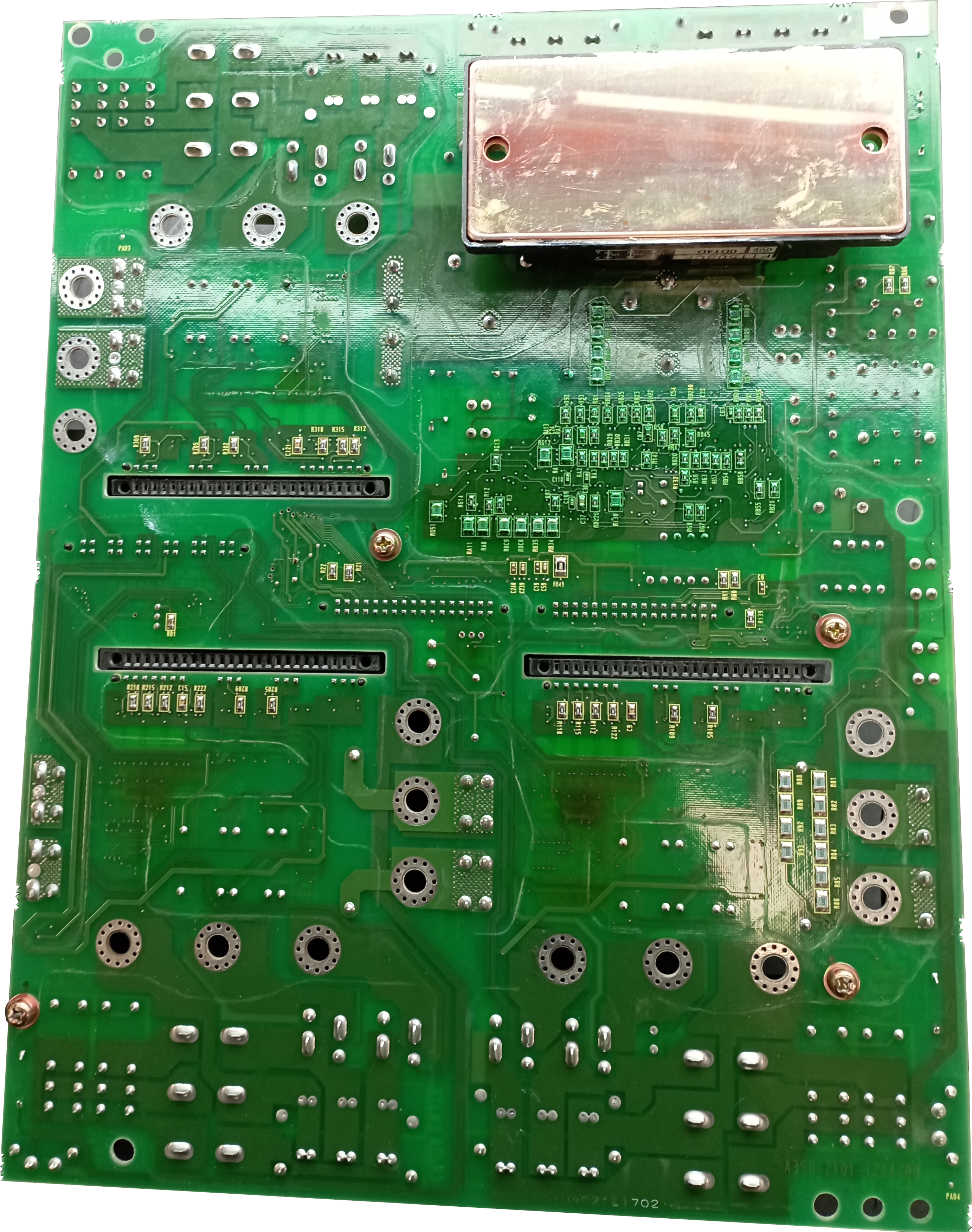
Y una vez instaladas en el banco de pruebas, se realizarán los correspondientes ensayos hasta poder identificar el origen del fallo y proceder a subsanarlo. Se consiguió identificar el fallo, que se encontraba en la placa de potencia en una de las dos líneas, en concreto en la que controla J1, J2 y J3. Las placas se limpian para dejarlas en perfecto estado y se reparan los errores localizados. En la siguiente imagen vemos la parte anterior y posterior de la placa de potencia después de haber separado todos los componentes para la reparación.
La prueba de diagnóstico final.
Una vez subsanados los errores se procedió a una labor de mantenimiento preventivo, sustituyendo los optoacopladores. Los condensadores electrolíticos estaban en perfecto estado, no siendo necesaria la sustitución.
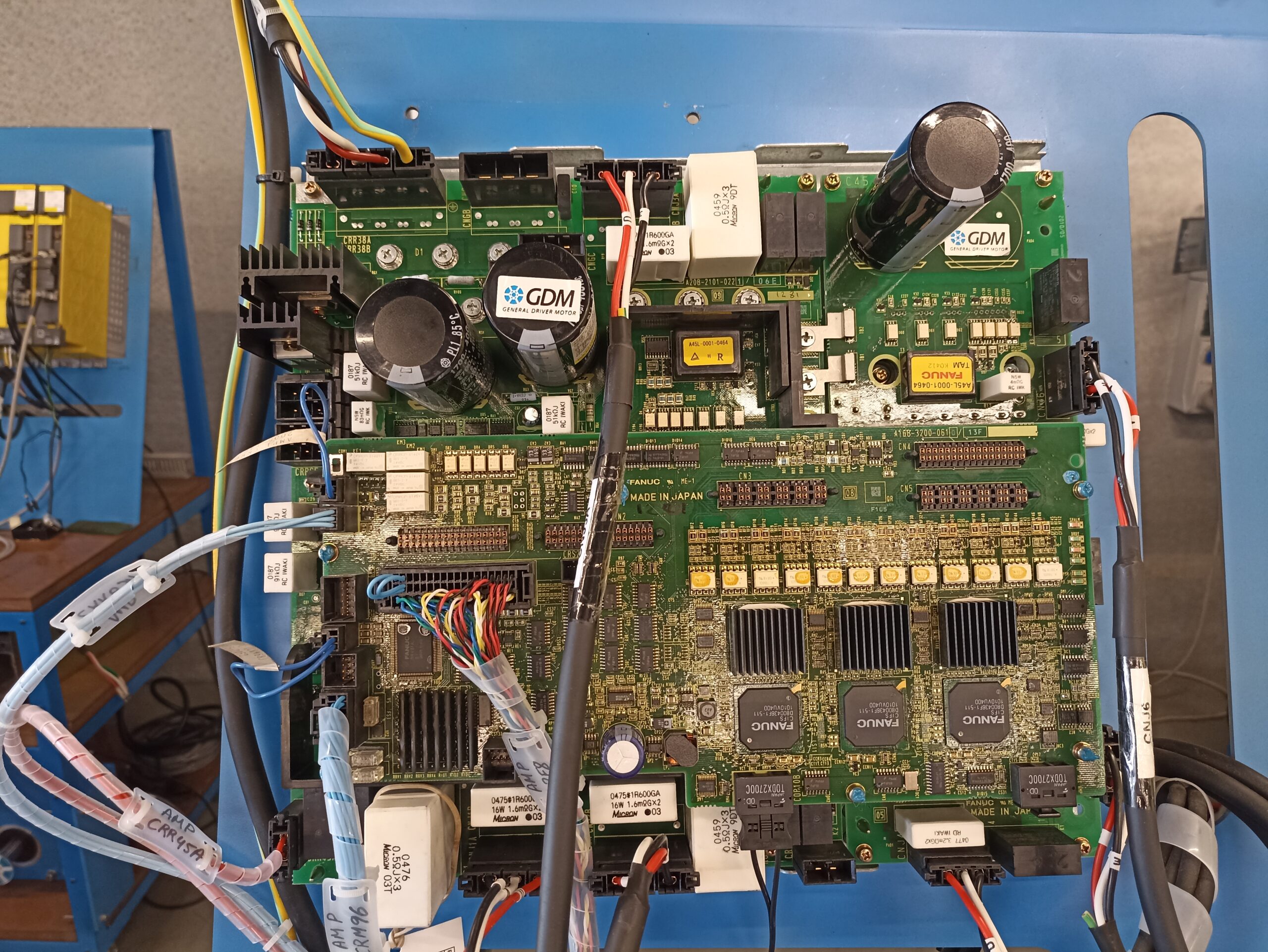
En este momento se procede al ensayo final sobre el banco de pruebas, para comprobar que todos los errores han desaparecido y el funcionamiento es correcto.
En las imágenes vemos las placas ya montadas sobre el banco de pruebas y un detalle del equipo una vez reparado y listo para la entrega final.
Si tienes alguna duda concreta sobre este servodrive compacto, pregúntanos, estaremos encantados de responderte. Para estos robots de Fanuc o para otros modelos del mercado. Ya sabes que en GDM reparamos todas las marcas.